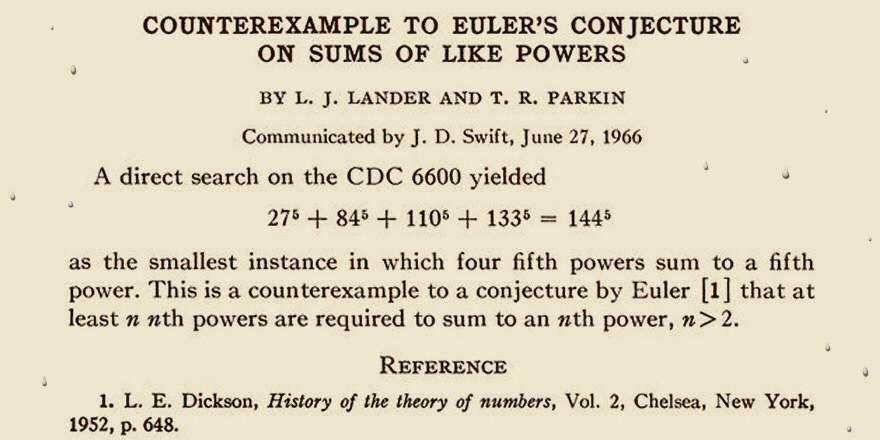
Euler’s conjecture, a theory proposed by Leonhard Euler in 1769, hung in there for 200 years. Then L.J. Lander and T.R. Parkin came along in 1966, and debunked the conjecture in two swift sentences. Their article — which is now open access and can be downloaded here — appeared in the Bulletin of the American Mathematical Society. If you’re wondering what the conjecture and its refutation are all about, you might want to ask Cliff Pickover, the author of 45 books on math and science. He brought this curious document to the web last week.
Related Content:
The Math in Good Will Hunting is Easy: How Do You Like Them Apples?
This article is even shorter: On a conjecture of R. J. Simpson about exact covering congruences
Author: Doron Zeilberger Drexel Univ., Philadelphia, PA
Published in: American Mathematical Monthly archive
Volume 96 Issue 3, March 1989 Page 243
http://www.jstor.org/discover/10.2307/2325213?uid=3739864&uid=2134&uid=2&uid=70&uid=4&uid=3739256&sid=21106466966333
Here is a longer version of the same article:
http://www.math.rutgers.edu/~zeilberg/mamarim/mamarimPDF/simpson.pdf
My contribution to this topic:
Short post, short papers, enjoy! LOG#170. The shortest papers ever: the list.
http://www.thespectrumofriemannium.com/2015/04/13/log170-the-shortest-papers-ever-the-list/
here must to consider that appear some as say prof dr mircea orasanu and prof horia orasanu
akso we see more aspects as say prof dr mircea orasanu and prof horia orasanu aspects as followings
MATHEMATICS AND EDUCATION
ABSTRACT
]. In these approaches one may derive covariant versions of the Fokker-Planck equation of Brownian motion in curved spaces. The mathematical approach to path integrals uses similar techniques [5]. The inherent ambiguities can be removed by demanding a certain form for Schrödinger equation of the system, which in curved space is have the Laplace-Beltrami operator as an operator for the kinetic energy [2], without an additional curvature scalar.
also here we can development some aspects as say prof dr mircea orasanu and prof horia orasanu
here we consider some as say prof dr mircea orasanu and prof horia orasanu as Riemann Hilbert problem
here as say prof dr mircea orasanu and prof horia orasanu must consider that are possible some aspects
sure as say prof dr mircea orasanu and prof horia orasanu as followed
GAUSS AND EULER
ABSTRACT
Let’s approach Leonhard Euler and his work the same way. It will make things a whole lot easier.
If one is not a mathematician (and except for a few of you out there, who is?), it’s going to be impossible to actually understand why Euler was such a great man. Other people will have to tell us, and we should probably believe them.
and thus prof dr mircea orasanu shown rhat
in these situations we consider that thus as how meet and as look prof dr mircea orasanu and prof drd horia orasanu as followed with
PROBLEM OF OPEN CULTURE AND APPLICATIONS
ABSTRACT
In general, partial differential equations are difficult to solve, but techniques have been developed for simpler classes of equations called linear, and for classes known loosely as “almost” linear, in which all derivatives of an order higher than one occur to the first power and their coefficients involve only the independent variables.
Many physically important partial differential equations are second-order and linear. For example:
uxx + uyy = 0 (two-dimensional Laplace equation)
uxx = ut (one-dimensional heat equation)
uxx − uyy = 0 (one-dimensional wave equation)
in other cases appear other conjectures as observed prof dr mircea orasanu as followed
PFAFF FORMS AND CONSEQUENCES
ABSTRACT
If is an even integer, the series reduces to a polynomial of degree with only even powers of and the series diverges. If is an odd integer, the series reduces to a polynomial of degree with only odd powers of and the series diverges. The general solution for an integer is then given by the Legendre polynomials
(25)
as an important question of the above are mentioned the F. VIETTE , KRONECKER Theorem and other as are observed in and for prof dr mircea orasanu and prof drd horia orasanu as followed
PARTIAL DIFFERENTIAL EQUATIONS AND ANALYTICAL CALCULUS
ABSTRACT
is very pedagogical thes questions and Partial differential equation, in mathematics, equation relating a function of several variables to its partial derivatives. A partial derivative of a function of several variables expresses how fast the function changes when one of its variables is changed, the others being held constant (compare ordinary differential equation). The partial derivative of a function is again a function, and, if f(x, y) denotes the original function of the variables x and y, the partial derivative with respect to x—i.e., when only x is allowed to vary—is typically written as fx(x, y) or ∂f/∂x. The operation of finding a partial derivative can be applied to a function that is itself a partial derivative of another function to get what is called a second-order partial derivative.In general, partial differential equations are difficult to solve, but techniques have been developed for simpler classes of equations called linear, and for classes known loosely as “almost” linear, in which all derivatives of an order higher than one occur to the first power and their coefficients involve only the independent variables.
Many physically important partial differential equations are second-order and linear. For example:
For an analogous treatment of elliptic curves defined as complete intersection in higher dimensional toric varieties, see the module weierstrass_higher.
Technically, this module computes the Weierstrass form of the Jacobian of the elliptic curve. This is why you will never have to specify the origin (or zero section) in the following and as established prof dr mircea orasanu these contribution appear a JACOBIAN and Louis University where work prof dr mircea orasanu but other can be not using some important equations
other situations appear for as considering the future of teacher education at the present time, I believe that it is relevant to consider the wider social and political context in which schools and institutions of teacher education are placed at this time observed prof dr mircea orasanu
in problem to approach we approach that are extended important considerations of algebraic structures as N is a monoid
Z is an integral domain
Q is a field
in the field R the order is complete
the field C is algebraically complete observed prof dr mircea orasanu that have not find by dir dudian lyc 39 because that he not known that you have been asked by a child to give them arithmetic problems, so they could show off their newly learned skills in addition and subtraction I’m sure that after a few problems such as: 2 + 3, 9 — 5, 10 + 2 and 6 — 4, you tried tossing them something a little more difficult: 4 — 7 only to be told “ That’s not allowed.” thus appear the ring of modulo (n) natural integer with considerations established by prof dr mircea orasanu inspired by e. galois and may not have realized is that you and the child did not just have different objects in mind (negative numbers) but entirely different algebraic systems. In other words a set of objects (they could be natural numbers, integers or reals) and a set of operations, or rules regarding how the numbers can be combined. thus these aspects are all unknown in FAC MAT bucharest We will take a very informal tour of some algebraic systems, but before we define some of the terms, let us build a structure which will have some necessary properties for examples and counterexamples that will help us clarify some of the definitions.
these aspects appear with some aspects as since that prof dr mircea orasanu and prof drd horia orasanu concern more and many as followed for Louis University in domain Colloquium of complex potential and Riemann Hilnert problem lead by I and to COLLEGE LYCEUM MAGNA
Effect of limited T
(3) Dose DFT give for every f ?
No! only discrete frequencies.
DFT as an estimate for X(f): even worse than due to the limited frequency resolution.
1. Effect of sampling frequency (or number of points) on accuracy when T is given: Example
use for
2. Effect of T (window size)
Compare and for
there many works concerning appeared of problem of Lagrangian and as observed prof dr mircea orasanu and prof drd horia orasanu are followed by consequences as CILLEGE LYCEUM MAGNA ‚but not Colleg virgil magearu Buc, or Colleg traian Buc because that these have poor acknowledgments in these sense , and ridiculous and must consider that New library content: IEEE Xplore Digital LibraryIEEE Xplore Digital Library provides access to the IEEE/IET Electronic Library which features content from IEEE (Institute of Electrical and Electronics Engineers) as well as IET (Institution of Engineering and Technology). mean that no appeared anything
EEE Xplore provides access to well-regarded and highly cited literature: IEEE’s scientific and technical articles fuel more new patents than any other publisher and are cited over 3 times more often. The database is updated daily with more than 20,000 new IEEE/IET articles added each month.and Leave a Reply
Your email address will not be published. Required fields are marked *
Commentno
there are many questions in History or science that are observed by prof dr mircea orasanu and prof drd horia orasanu and as followed for establised of important situations and chapter of scleronoomous developments and other so a simple pendulum is a system composed of a weight and a string. The string is attached at the top end to a pivot and at the bottom end to a weight. Being inextensible, the string’s length is a constant. Therefore, this system is scleronomous; it obeys scleronomic constraint
x 2 + y 2 − L = 0 , {\displaystyle {\sqrt {x^{2}+y^{2}}}-L=0\,\!,} {\sqrt {x^{2}+y^{2}}}-L=0\,\!,
where ( x , y ) {\displaystyle (x,y)\,\!} (x,y)\,\! is the position of the weight and L {\displaystyle L\,\!} L\,\! is length of the string.
A simple pendulum with oscillating pivot point
Take a more complicated example. Refer to the next figure at right, Assume the top end of the string is attached to a pivot point undergoing a simple harmonic motion
x t = x 0 cos ω t , {\displaystyle x_{t}=x_{0}\cos \omega t\,\!,} x_{t}=x_{0}\cos \omega t\,\!,
where x 0 {\displaystyle x_{0}\,\!} x_{0}\,\! is amplitude, ω {\displaystyle \omega \,\!} \omega \,\! is angular frequency, and t {\displaystyle t\,\!} t\,\! is time.
indeed is true that these are serious journal and accepted profound articles or comment compared with other ‚as recent observed prof dr mircea orasanu and prof drd horia orasanu specially in point views of Bezout theorem or Galois theory
in many situations concerning the pedagogy appear for prof dr mircea orasanu and prof drd horia orasanu important situations due these occasion that permitted many consequences
in many situations are adopted important aspects of the above problem and consequences as observed prof dr mircea orasanu and prof drd horia orasanu specially and followed that are applied for non holonomic problem CONSTRAINTS OPTIMIZATION and Fundamental Theorem of Algebra that lead to ideas of prof dr Constantin Udriste
for most important aspects are presented other situations so that observed prof dr mircea and prof dr d horia orasanu that remarked the form of applications and followed that then so lead to CONSTRAINTS problem and thus . Locomotion of a snake-like structure in accordance with the serpenoid curve, i.e. lateral undulation, is achieved if the joints of the robot move according to the reference joint trajectories in the form of a sinusoidal function with specified amplitude, frequency, and phase shift. In particular, using the foregoing defined new states, we define a constraint function for the ith joint of the snake robot by
Φi = αsin(η + (i − 1)δ) + ϕo
(45)
where i∈{1,…,N−1}, α denotes the amplitude of the sinusoidal joint motion, and δ is a phase shift that is used to keep the joints out of phase. Moreover, ϕo is an offset value that is identical for all of the joints. It was illustrated in [16] how the offset value ϕo affects the orientation of the snake robot in the plane. Building further on this insight, we consider the second-order time derivative of ϕo in the form of a dynamic compensator, which will be used to control the orientation of the robot. In particular, through this control term, we modify the orientation of the robot in accordance with a reference orientation. This will be done by adding an offset angle to the reference trajectory of each joint. We will show that this will steer the position of the CM of the robot towards the desired path. The constraint function (45) is dynamic, since it depends on the solution of a dynamic compensator.
Virtual holonomic constraint for the head link angle
In this subsection, we define a constraint function for the head angle of the robot. In particular, we use a line-of-sight (LOS) guidance law as the reference angle for the head link. LOS guidance is a much-used method in marine control systems (see, e.g. [27]). In general, guidance-based control strategies are based on defining a reference heading angle for the vehicle through a guidance law and designing a controller to track this angle [27]. Motivated by marine control literature, in [17] based on a simplified model of the snake robot, using cascade systems theory, it was proved that if the heading angle of the snake robot was controlled to the LOS angle, then also the position of the CM of the robot would converge to the desired path. We will show that a similar guidance-based control strategy can successfully steer the robot towards the desired path. However, we perform the model-based control design based on a more accurate model of the snake robot which does not contain the simplifying assumptions of [17] which are valid for small joint angles.
To define the guidance law, without loss of generality, we assign the global coordinate system such that the global x‑axis is aligned with the desired path. Consequently, the position of the CM of the robot along the y‑axis, denoted by py, defines the shortest distance between the robot and the desired path, often referred to as the cross-track error. In order to solve the path following problem, we use the LOS guidance law as a virtual holonomic constraint, which defines the desired head angle as a function of the cross-track error as
ΦN=−tan−1(pyΔ)
for many situations are considered developments pf main theory and Adrien LEGENDRE concepts observed prof dr mircea orasanu and prof drd horia orasanu and complex potential flow that lead to CONSTRAINTS OPTIMIZATIONS having in views that prof dr Constantin Udriste developed these concepts
in these must consider modular forms as observed prof dr mircea orasanu and prof drd horia orasanu and concerning and followed these used for ELLIPTICAL and integrals that are used for developed forms